宁波材料所在仿生各向异性水凝胶构建及其驱动器应用方面取得系列进展
高分子水凝胶驱动器是一类能够对外界刺激(光、热、化学、电等)产生可逆形变或者体积改变的新型智能材料。作为一类与生物组织相似的“软、湿”态材料,水凝胶驱动器在软体机器人、人工肌肉、人造阀门等领域存在巨大的潜在应用价值。
为此,中国科学院宁波材料技术与工程研究所智能高分子材料团队的陈涛研究员和张佳玮研究员开展了一系列工作。通过构筑非对称性各向异性水凝胶及其复合体系,实现了仿生水凝胶驱动器的多功能化(如图1)。科研人员通过选择性局部还原氧化石墨烯-聚N-异丙基丙烯酰胺,得到了能在pH、温度、近红外、离子强度等多种外界刺激下进行复杂三维形变的“仿生抓手”(Adv. Funct. Mater. 2016, 26, 8670);在智能驱动和智能变色方面长期的研究基础上,他们开发了一种具有3D复杂驱动-智能变色双功能协同的新型智能仿生水凝胶(Adv. Funct. Mater. 2018, 28, 1704568,);为克服水凝胶驱动器难以脱离水环境进行驱动的缺陷,通过双层水凝胶内部水循环体系的构筑,成功实现了可在水、油、空气等多种环境中驱动(J. Mater. Chem. C 2018, 6, 1320);此外,还把驱动和形状记忆结合起来,以此作为形状记忆材料的受力来源,实现材料形变的可控调节(Chem. Commun. 2018, 54, 1229)
基于上述系列研究成果及近几年在仿生各向异性水凝胶驱动器方面的研究经验,研究人员近期发表综述文章(Adv. Sci., 2018, 1801584),系统介绍了近年来仿生各向异性水凝胶驱动器相关研究的最新进展。其中,对各向异性结构,包括双层结构、梯度结构、图案化结构以及取向结构等多种非对称性结构的构造方法及其相应的典型案例做了细致梳理;总结概括了水凝胶驱动器在执行器、行走器/游泳器、人工阀门等仿生器件方面可能存在的应用;此外,通过荧光性能、形状记忆功能、自修复等的引入,多功能水凝胶驱动器也成为仿生各向异性水凝胶驱动器一个重要的研究内容。最后,研究人员讨论了这类材料现存的挑战及其未来的发展方向,包括如何精确控制形变、如何提高水凝胶强度以实现实际应用、如何提高响应速度等。相信在不久的将来,仿生各向异性水凝胶驱动器将取得蓬勃的发展。
以上工作得到了国家自然科学基金(51773215, 21774138, 21644009)、浙江省自然科学基金(LY17B040003, LY17B040004),中科院前沿科学重点研究项目(QYZDB-SSW-SLH036)的资助以及中科院青年创新促进会的支持(2017337)。
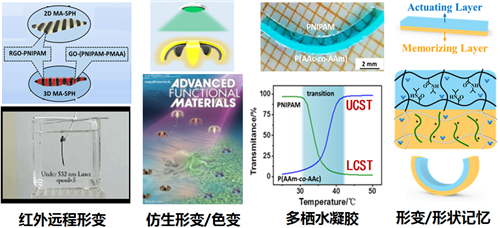
图1 多功能仿生水凝胶驱动器的构建
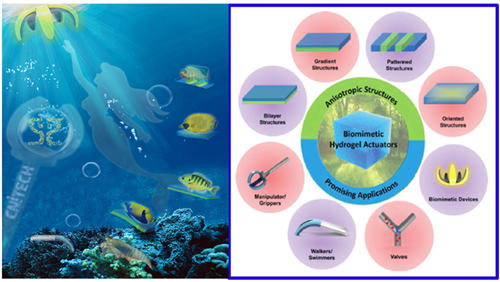
图2 仿生水凝胶驱动器的各向异性结构构筑及其潜在应用
(高分子事业部 乐晓霞)